Flagship Project
Canard Control Module and Custom PCB
A canard-based active control module for sounding rockets with integrated avionics.
PCBControlAvionicsElectronicsSensors
Designed a canard control module for a sounding rocket, integrating flight control surfaces with the avionics system for active stabilisation during ascent.
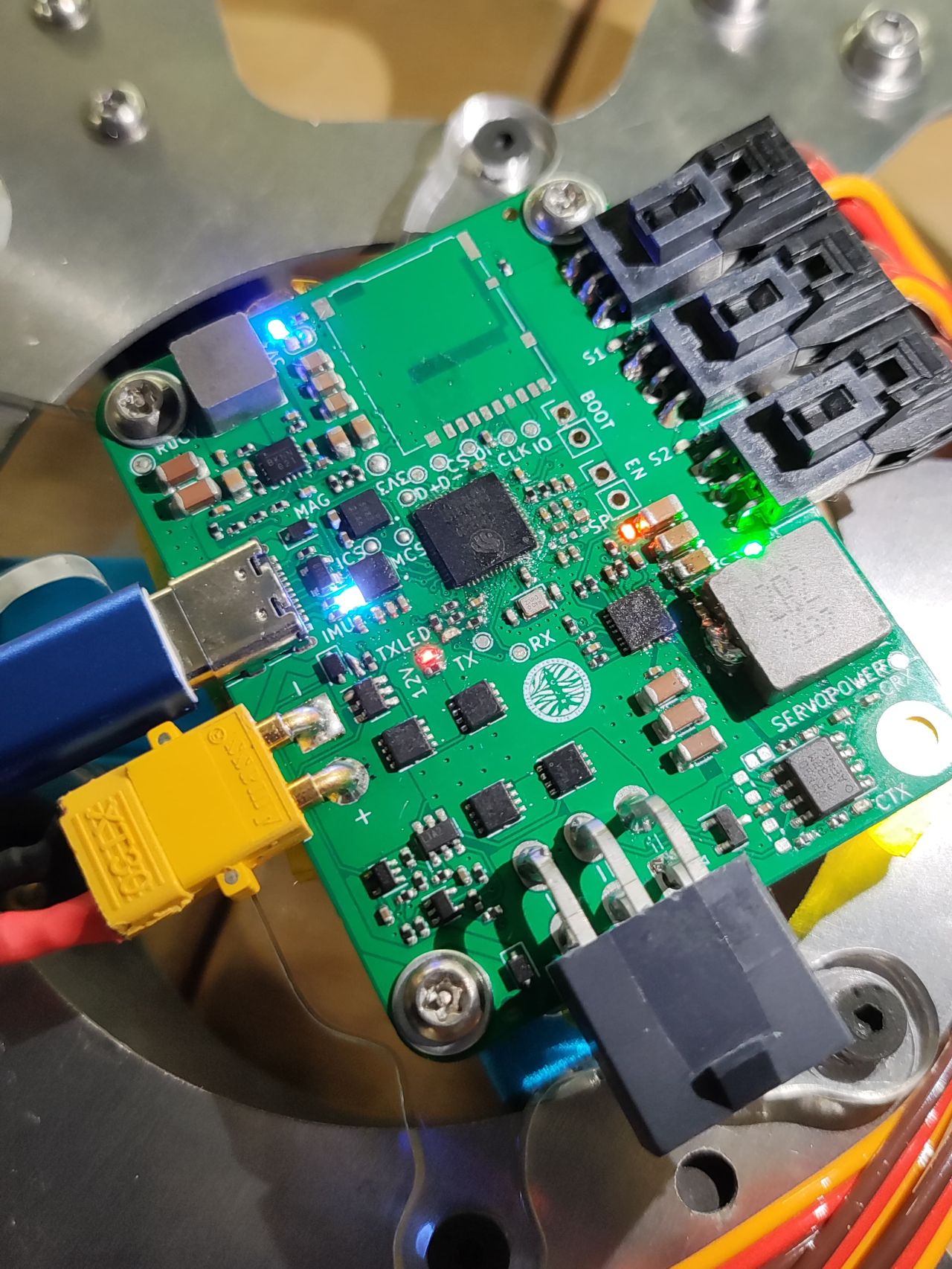
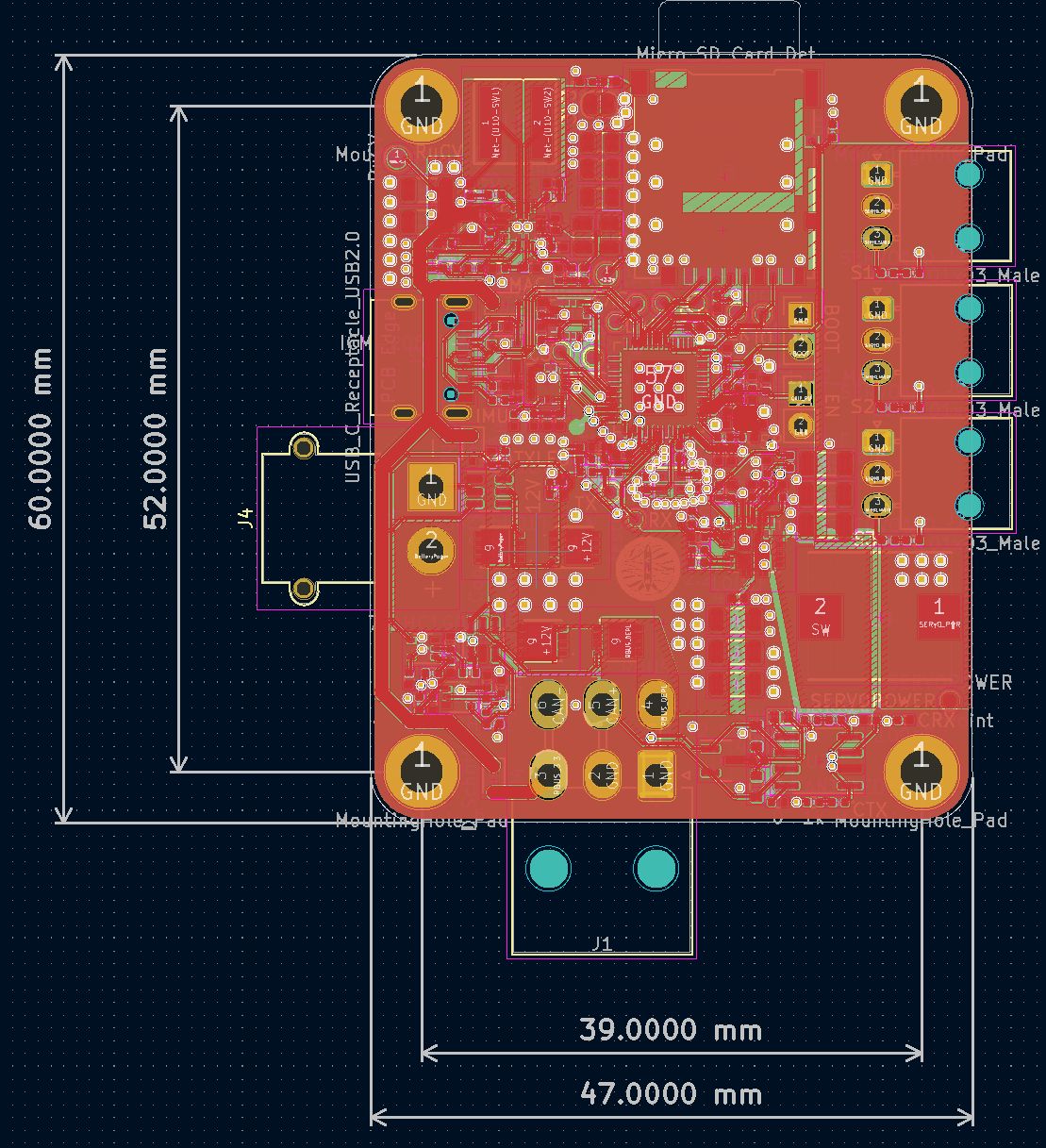
I also built a custom PCB that drives three servos with the ESP32S3 as the microcontroller and is designed to be wholly powered by its own 3s Li-ion battery, integrated into the rocket’s network protocol. All of this fits snuggly into a 60mm x 52mm package!
Here are a few additional technical specifications for my board:
- Features a CAN 2.0 bus to communicate with the rest of the rocket.
- 3 Servos Channels.
- Uses an ICM20608-G IC, a 6 DOF accelerometer and gyroscope for roll rate feedback.
- Uses an MMC5983MA, a 3-axis magnetometer for more accurate roll positioning.
- SD card for data logging of measured roll rates and their corresponding actuator control outputs.
- Uses SPI to talk to the IMU, Magnetometer and a logging SD Card
- A lot of LEDs to add to the rocket “Christmas tree” effect :)
The design of the power system for this PCB required a lot of consideration, conversations and revisions. Here are some highlights:
- The battery voltage is regulated down to the maximum servo voltage of 7.4V through a SiC437 buck converter.
- Logic power can be from the rocket or the battery, regulated to 4V using a SiC437 then cleanly to 3.3V with a SC4215.
- My PCB is designed to be wholly powered by its own 3s Li-ion battery, but can switch over to use the rocket’s power if the primary battery voltage is lost. This switchover is automatically performed by an LTC4412 ideal diode controlling double-backed MOSFETs independently of the microcontroller.
- Care was also taken to space the DC-DC converters from critical components to minimize the effects of switching noise during operation.